-
1 название вывода
-
2 название вывода
Household appliances: pin description -
3 название вывода
Русско-английский научно-технический словарь Масловского > название вывода
-
4 название
-
5 гнездо для штырькового вывода
Русско-английский большой базовый словарь > гнездо для штырькового вывода
-
6 pin description
Англо-русский словарь промышленной и научной лексики > pin description
-
7 человеко-машинный интерфейс
- operator-machine communication
- MMI
- man-machine interface
- man-machine communication
- human-machine interface
- human-computer interface
- human interface device
- human interface
- HMI
- computer human interface
- CHI
человеко-машинный интерфейс (ЧМИ)
Технические средства, предназначенные для обеспечения непосредственного взаимодействия между оператором и оборудованием и дающие возможность оператору управлять оборудованием и контролировать его функционирование.
Примечание
Такие средства могут включать приводимые в действие вручную органы управления, контрольные устройства, дисплеи.
[ ГОСТ Р МЭК 60447-2000]
человекомашинный интерфейс (ЧМИ)
Технические средства контроля и управления, являющиеся частью оборудования, предназначенные для обеспечения непосредственного взаимодействия между оператором и оборудованием и дающие возможность оператору управлять оборудованием и контролировать его функционирование (ГОСТ Р МЭК 60447).
Примечание
Такие средства могут включать приводимые в действие вручную органы управления, контрольные устройства и дисплеи.
[ ГОСТ Р МЭК 60073-2000]
человеко-машинный интерфейс
Средства обеспечения двусторонней связи "оператор - технологическое оборудование" (АСУ ТП). Название класса средств, в который входят подклассы:
SCADA (Supervisory Control and Data Acquisition) - Операторское управление и сбор данных от технологического оборудования.
DCS (Distributed Control Systems) - Распределенная система управления технологическим оборудованием.
[ http://www.morepc.ru/dict/]Параллельные тексты EN-RU
MotorSys™ iPMCC solutions can integrate a dedicated human-machine interface (HMI) or communicate via a personal computer directly on the motor starters.
[Schneider Electric]Интеллектуальный центр распределения электроэнергии и управления электродвигателями MotorSys™ может иметь в своем составе специальный человеко-машинный интерфейс (ЧМИ). В качестве альтернативы используется обмен данным между персональным компьютером и пускателями.
[Перевод Интент]
HMI на базе операторских станций
Самое, пожалуй, главное в системе управления - это организация взаимодействия между человеком и программно-аппаратным комплексом. Обеспечение такого взаимодействия и есть задача человеко-машинного интерфейса (HMI, human machine interface).
На мой взгляд, в аббревиатуре “АСУ ТП” ключевым является слово “автоматизированная”, что подразумевает непосредственное участие человека в процессе реализации системой определенных задач. Очевидно, что чем лучше организован HMI, тем эффективнее человек сможет решать поставленные задачи.
Как же организован HMI в современных АСУ ТП?
Существует, как минимум, два подхода реализации функционала HMI:- На базе специализированных рабочих станций оператора, устанавливаемых в центральной диспетчерской;
- На базе панелей локального управления, устанавливаемых непосредственно в цеху по близости с контролируемым технологическим объектам.
Иногда эти два варианта комбинируют, чтобы достичь наибольшей гибкости управления. В данной статье речь пойдет о первом варианте организации операторского уровня.
Аппаратно рабочая станция оператора (OS, operator station) представляет собой ни что иное как персональный компьютер. Как правило, станция снабжается несколькими широкоэкранными мониторами, функциональной клавиатурой и необходимыми сетевыми адаптерами для подключения к сетям верхнего уровня (например, на базе Industrial Ethernet). Станция оператора несколько отличается от привычных для нас офисных компьютеров, прежде всего, своим исполнением и эксплуатационными характеристиками (а также ценой 4000 - 10 000 долларов).
На рисунке 1 изображена рабочая станция оператора системы SIMATIC PCS7 производства Siemens, обладающая следующими техническими характеристиками:
Процессор: Intel Pentium 4, 3.4 ГГц;
Память: DDR2 SDRAM до 4 ГБ;
Материнская плата: ChipSet Intel 945G;
Жесткий диск: SATA-RAID 1/2 x 120 ГБ;
Слоты: 4 x PCI, 2 x PCI E x 1, 1 x PCI E x 16;
Степень защиты: IP 31;
Температура при эксплуатации: 5 – 45 C;
Влажность: 5 – 95 % (без образования конденсата);
Операционная система: Windows XP Professional/2003 Server.
Рис. 1. Пример промышленной рабочей станции оператора.Системный блок может быть как настольного исполнения ( desktop), так и для монтажа в 19” стойку ( rack-mounted). Чаще применяется второй вариант: системный блок монтируется в запираемую стойку для лучшей защищенности и предотвращения несанкционированного доступа.
Какое программное обеспечение используется?
На станции оператора устанавливается программный пакет визуализации технологического процесса (часто называемый SCADA). Большинство пакетов визуализации работают под управлением операционных систем семейства Windows (Windows NT 4.0, Windows 2000/XP, Windows 2003 Server), что, на мой взгляд, является большим минусом.
Программное обеспечение визуализации призвано выполнять следующие задачи:- Отображение технологической информации в удобной для человека графической форме (как правило, в виде интерактивных мнемосхем) – Process Visualization;
- Отображение аварийных сигнализаций технологического процесса – Alarm Visualization;
- Архивирование технологических данных (сбор истории процесса) – Historical Archiving;
- Предоставление оператору возможности манипулировать (управлять) объектами управления – Operator Control.
- Контроль доступа и протоколирование действий оператора – Access Control and Operator’s Actions Archiving.
- Автоматизированное составление отчетов за произвольный интервал времени (посменные отчеты, еженедельные, ежемесячные и т.д.) – Automated Reporting.
Как правило, SCADA состоит из двух частей:
- Среды разработки, где инженер рисует и программирует технологические мнемосхемы;
- Среды исполнения, необходимой для выполнения сконфигурированных мнемосхем в режиме runtime. Фактически это режим повседневной эксплуатации.
Существует две схемы подключения операторских станций к системе управления, а точнее уровню управления. В рамках первой схемы каждая операторская станция подключается к контроллерам уровня управления напрямую или с помощью промежуточного коммутатора (см. рисунок 2). Подключенная таким образом операторская станция работает независимо от других станций сети, и поэтому часто называется одиночной (пусть Вас не смущает такое название, на самом деле таких станций в сети может быть несколько).

Рис. 2. Схема подключения одиночных операторских станций к уровню управления.Есть и другой вариант. Часто операторские станции подключают к серверу или резервированной паре серверов, а серверы в свою очередь подключаются к промышленным контроллерам. Таким образом, сервер, являясь неким буфером, постоянно считывает данные с контроллера и предоставляет их по запросу рабочим станциям. Станции, подключенные по такой схеме, часто называют клиентами (см. рисунок 3).
Как происходит информационный обмен?
Рис. 3. Клиент-серверная архитектура операторского уровня.
Для сопряжения операторской станции с промышленным контроллером на первой устанавливается специальное ПО, называемое драйвером ввода/вывода. Драйвер ввода/вывода поддерживает совместимый с контроллером коммуникационный протокол и позволяет прикладным программам считывать с контроллера параметры или наоборот записывать в него. Пакет визуализации обращается к драйверу ввода/вывода каждый раз, когда требуется обновление отображаемой информации или запись измененных оператором данных. Для взаимодействия пакета визуализации и драйвера ввода/вывода используется несколько протоколов, наиболее популярные из которых OPC (OLE for Process Control) и NetDDE (Network Dynamic Data Exchange). Обобщенно можно сказать, что OPC и NetDDE – это протоколы информационного обмена между различными приложениями, которые могут выполняться как на одном, так и на разных компьютерах. На рисунках 4 и 5 изображено, как взаимодействуют программные компоненты при различных схемах построения операторского уровня.
Рис. 4. Схема взаимодействия программных модулей при использовании одиночных станций.
Рис. 5. Схема взаимодействия программных модулей при использовании клиент-серверной архитектуры.
Как выглядит SCADA?
Разберем простой пример. На рисунке 6 приведена абстрактная схема технологического процесса, хотя полноценным процессом это назвать трудно. Рис. 6. Пример операторской мнемосхемы.
Рис. 6. Пример операторской мнемосхемы.
На рисунке 6 изображен очень упрощенный вариант операторской мнемосхемы для управления тех. процессом. Как видно, резервуар (емкость) наполняется водой. Задача системы - нагреть эту воду до определенной температуры. Для нагрева воды используется газовая горелка. Интенсивность горения регулируется клапаном подачи газа. Также должен быть насос для закачки воды в резервуар и клапан для спуска воды.
На мнемосхеме отображаются основные технологические параметры, такие как: температура воды; уровень воды в резервуаре; работа насосов; состояние клапанов и т.д. Эти данные обновляются на экране с заданной частотой. Если какой-либо параметр достигает аварийного значения, соответствующее поле начинает мигать, привлекая внимание оператора.
Сигналы ввода/вывода и исполнительные механизмы отображаются на мнемосхемах в виде интерактивных графических символов (иконок). Каждому типу сигналов и исполнительных механизмов присваивается свой символ: для дискретного сигнала это может быть переключатель, кнопка или лампочка; для аналогового – ползунок, диаграмма или текстовое поле; для двигателей и насосов – более сложные фейсплейты ( faceplates). Каждый символ, как правило, представляет собой отдельный ActiveX компонент. Вообще технология ActiveX широко используется в SCADA-пакетах, так как позволяет разработчику подгружать дополнительные символы, не входящие в стандартную библиотеку, а также разрабатывать свои собственные графические элементы, используя высокоуровневые языки программирования.
Допустим, оператор хочет включить насос. Для этого он щелкает по его иконке и вызывает панель управления ( faceplate). На этой панели он может выполнить определенные манипуляции: включить или выключить насос, подтвердить аварийную сигнализацию, перевести его в режим “техобслуживания” и т.д. (см. рисунок 7). Рис. 7. Пример фейсплейта для управления насосом.Оператор также может посмотреть график изменения интересующего его технологического параметра, например, за прошедшую неделю. Для этого ему надо вызвать тренд ( trend) и выбрать соответствующий параметр для отображения. Пример тренда реального времени показан на рисунке 8.
Рис. 7. Пример фейсплейта для управления насосом.Оператор также может посмотреть график изменения интересующего его технологического параметра, например, за прошедшую неделю. Для этого ему надо вызвать тренд ( trend) и выбрать соответствующий параметр для отображения. Пример тренда реального времени показан на рисунке 8.
 Рис. 8. Пример отображения двух параметров на тренде реального времени.
Рис. 8. Пример отображения двух параметров на тренде реального времени.
Для более детального обзора сообщений и аварийных сигнализаций оператор может воспользоваться специальной панелью ( alarm panel), пример которой изображен на рисунке 9. Это отсортированный список сигнализаций (alarms), представленный в удобной для восприятия форме. Оператор может подтвердить ту или иную аварийную сигнализацию, применить фильтр или просто ее скрыть. Рис. 9. Панель сообщений и аварийных сигнализаций.
Рис. 9. Панель сообщений и аварийных сигнализаций.
Говоря о SCADA, инженеры часто оперируют таким важным понятием как “тэг” ( tag). Тэг является по существу некой переменной программы визуализации и может быть использован как для локального хранения данных внутри программы, так и в качестве ссылки на внешний параметр процесса. Тэги могут быть разных типов, начиная от обычных числовых данных и кончая структурой с множеством полей. Например, один визуализируемый параметр ввода/вывода – это тэг, или функциональный блок PID-регулятора, выполняемый внутри контроллера, - это тоже тэг. Ниже представлена сильно упрощенная структура тэга, соответствующего простому PID-регулятору:
Tag Name = “MyPID”;
Tag Type = PID;
Fields (список параметров):
MyPID.OP
MyPID.SP
MyPID.PV
MyPID.PR
MyPID.TI
MyPID.DI
MyPID.Mode
MyPID.RemoteSP
MyPID.Alarms и т.д.
В комплексной прикладной программе может быть несколько тысяч тэгов. Производители SCADA-пакетов это знают и поэтому применяют политику лицензирования на основе количества используемых тэгов. Каждая купленная лицензия жестко ограничивает суммарное количество тэгов, которые можно использовать в программе. Очевидно, чем больше тегов поддерживает лицензия, тем дороже она стоит; так, например, лицензия на 60 000 тэгов может обойтись в 5000 тыс. долларов или даже дороже. В дополнение к этому многие производители SCADA формируют весьма существенную разницу в цене между “голой” средой исполнения и полноценной средой разработки; естественно, последняя с таким же количеством тэгов будет стоить заметно дороже.
Сегодня на рынке представлено большое количество различных SCADA-пакетов, наиболее популярные из которых представлены ниже:
1. Wonderware Intouch;
2. Simatic WinCC;
3. Iconics Genesis32;
4. Citect;
5. Adastra Trace Mode
Лидирующие позиции занимают Wonderware Intouch (производства Invensys) и Simatic WinCC (разработки Siemens) с суммарным количеством инсталляций более 80 тыс. в мире. Пакет визуализации технологического процесса может поставляться как в составе комплексной системы управления, так и в виде отдельного программного продукта. В последнем случае SCADA комплектуется набором драйверов ввода/вывода для коммуникации с контроллерами различных производителей. [ http://kazanets.narod.ru/HMI_PART1.htm]Тематики
- автоматизация, основные понятия
- автоматизированные системы
Синонимы
EN
Русско-английский словарь нормативно-технической терминологии > человеко-машинный интерфейс
8 программируемый логический контроллер
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего. Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы. Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7. Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series. Рис. 4. Резервированный контроллер FCP270.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA). Рис. 5. Контроллер AC800M.
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Русско-английский словарь нормативно-технической терминологии > программируемый логический контроллер
9 дифференциальный манометр
- differential-pressure gage
- differential pressure indicator
- differential pressure gage
- differential manometer
- differential gauge pressure
дифференциальный манометр
дифманометр
Манометр для измерения разности двух давлений.
Примечание
Дифманометр с верхним пределом измерения не более 40000 Па (4000 кгс/м2) называется микроманометром.
[ГОСТ 8.271-77]
дифференциальный манометр
-
[Лугинский Я. Н. и др. Англо-русский словарь по электротехнике и электроэнергетике. 2-е издание - М.: РУССО, 1995 - 616 с.]EN
differential-pressure gage
(engineering) Apparatus to measure pressure differences between two points in a system; it can be a pressured liquid column balanced by a pressured liquid reservoir, a formed metallic pressure element with opposing force, or an electrical-electronic gage (such as strain, thermal-conductivity, or ionization).
[ http://www.answers.com/topic/differential-pressure-gage#ixzz1gzzibWaQ]Малые значения дифференциального давления могут измеряться приборами на основе мембран и сильфонов.
Манометры дифференциальные сильфонные показывающие типа ДСП-160 нашли широкое применение на территории СНГ. Принцип их действия основан на деформации двух автономных сильфонных блоков, находящихся под воздействием «плюсового» и «минусового» давления. Эти деформации преобразовываются в перемещение указательной стрелки прибора. Перемещение стрелки осуществляется до установления равновесия между «плюсовым» сильфоном, с одной стороны, и «минусовым» и цилиндрической пружиной - с другой.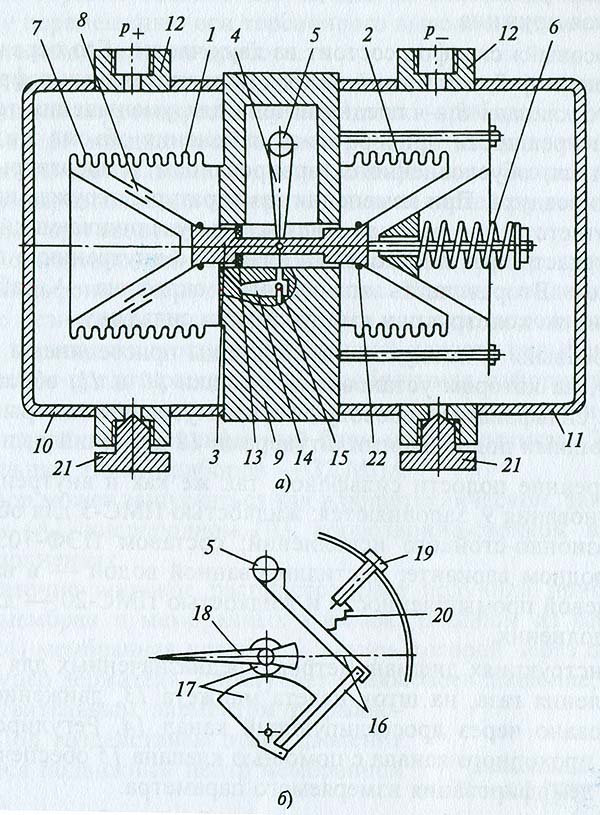
Рис. 2.23Дифференциальный сильфонный манометр:
а – схема привода стрелки;
б – блок первичного преобразования;
1 – «плюсовый» сильфон;
2 – «минусовый» сильфон;
3 – шток;
4 – рычаг;
5 – торсионный вывод;
6 – цилиндрическая пружина;
7 – компенсатор;
8 – плоскостный клапан;
9 – основание;
10 и 11 – крышки;
12 – подводящий штуцер;
13 – манжета;
14 – дросселирующий канал;
15 – клапан;
16 – рычажная система;
17 – трибко-секторный механизм;
18 – стрелка;
19 – регулировочный винт;
20 – натяжная пружина;
21 – пробка;
22 – уплотнительное резиновое кольцо«Плюсовый» 1 и «минусовый» 2 сильфоны (рис. Рис. 2.23, б) соединены между собой штоком 3, функционально связанным с рычагом 4, который, в свою очередь, неподвижно закреплен на оси торсионного вывода 5. К концу штока на выходе «минусового» сильфона присоединена цилиндрическая пружина 6, закрепленная нижним основанием на компенсаторе 7 и работающая на растяжение. Каждому номинальному перепаду давления соответствует определенная пружина.
«Плюсовый» сильфон состоит из двух частей. Его первая часть (компенсатор 7, состоящий из трех дополнительных гофр и плоскостных клапанов 8) предназначена для уменьшения температурной погрешности прибора из-за изменения объема жидкости-наполнителя, обусловленного варьированием температуры окружающего воздуха. При изменении температуры окружающей среды и соответственно рабочей жидкости ее увеличивающийся объем перетекает через плоскостный клапан во внутреннюю полость сильфонов. Вторая часть «плюсового» сильфона рабочая и идентична по конструкции «минусовому» сильфону.
«Плюсовый» и «минусовый» сильфоны присоединены к основанию 9, на котором установлены крышки 10 и 11, образующие вместе с сильфонами «плюсовую» и «минусовую» камеры с соответствующими подводящими штуцерами 12 давления р + и рВнутренние объемы сильфонов, так же как и внутренняя полость основания 9, заполняются: жидкостью ПМС-5 для обычного и коррозионно-стойкого исполнений; составом ПЭФ-703110 – в кислородном варианте; дистиллированной водой – в варианте для пищевой промышленности и жидкостью ПМС-20 – для газового исполнения.
В конструкциях дифманометров, предназначенных для измерения давления газа, на шток одета манжета 13, движение среды организовано через дросселирующий канал 14. Регулированием размера проходного канала с помощью клапана 15 обеспечивается степень демпфирования измеряемого параметра.
Дифманометр работает следующим образом. Среды «плюсового» и «минусового» давления поступают через подводящие штуцеры в «плюсовую» и «минусовую» камеры соответственно. «Плюсовое» давление в большей степени воздействует на сильфон 1, сжимая его. Это приводит к перетоку находящейся внутри жидкости в «минусовый» сильфон, который растягивается и разжимает цилиндрическую пружину. Такая динамика происходит до уравновешивания сил взаимодействия между «плюсовым» сильфоном и парой – «минусовый» сильфон – цилиндрическая пружина. Мерой деформации сильфонов и их упругого взаимодействия служит перемещение штока, которое передается на рычаг и соответственно на ось торсионного вывода. На этой оси (рис. 2.23,а) закреплена рычажная система 16, обеспечивающая передачу вращения оси торсионного вывода к трибко-секторному механизму 17 и стрелке 18. Таким образом, воздействие на один из сильфонов приводит к угловому перемещению оси торсионного вывода и затем к повороту указательной стрелки прибора.
Регулировочным винтом 19 с помощью натяжной пружины 20 производится корректировка нулевой точки прибора.
Пробки 21 предназначены для продувки импульсных линий, промывки измерительных полостей сильфонного блока, слива рабочей среды, заполнения измерительных полостей разделительной жидкостью при вводе прибора в работу.
При односторонней перегрузке одной из камер происходит сжатие сильфона и перемещение штока. Клапан в виде уплотнительного резинового кольца 22 садится в гнездо основания, перекрывает переток жидкости из внутренней полости сильфона, и таким образом предотвращается его необратимая деформация. При непродолжительных перегрузках разность «плюсового» и «минусового» давления на сильфонный блок может достигать 25 МПа, а в отдельных типах приборов не превышать 32 МПа.
прибор может выпускаться как в общетеническом, так и в аммиачном (А), кислородном (К), коррозионно-стойком-пищевом (Пп) исполнениях.
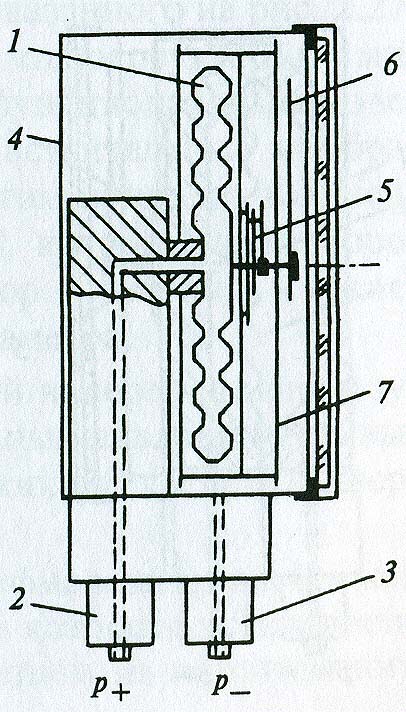
Рис. 2.24Показывающий дифференциальный манометр на основе мембранной коробки:
1 – мембранная коробка;
2 – держатель «плюсового» давления;
3 – держатель «минусового» давления;
4 – корпус;
5 – передаточный механизм;
6 – стрелка;
7 – циферблаДостаточно широкое распространение получили приборы на основе мембран и мембранных коробок. В одном из вариантов (рис. 2.24) мембранная коробка 1, внутрь которой через подводящий штуцер держателя 2 поступает «плюсовое» давление, является чувствительным элементом дифманометра. Под воздействием этого давления смещается подвижный центр мембранной коробки.
«Минусовое» давление через подводящий штуцер держателя 3 подается внутрь герметичного корпуса 4 прибора и воздействует на мембранную коробку снаружи, создавая противодействие перемещению ее подвижного центра. Таким образом «плюсовое» и «минусовое» давления уравновешивают друг друга, а перемещение подвижного центра мембранной коробки свидетельствует о величине разностного – дифференциального давления. Этот сдвиг через передаточный механизм передается на указательную стрелку 6, которая на шкале циферблата 7 показывает измеряемое дифференциальное давление.
Диапазон измеряемого давления определяется свойствами мембран и ограничивается, как правило, в пределах от 0 до 0,4…40 кПа. При этом класс точности может составлять 1,5; 1,0; 0,6; 0,4, а в некоторых приборах 0,25.
Обязательная конструктивная герметичность корпуса определяет высокую защищенность от внешних воздействий и определяется в основном уровнем IP66.
В качестве материала для чувствительных элементов приборов используется бериллиевая и другие бронзы, а также нержавеющая сталь, для штуцеров, передаточных механизмов – медные сплавы, коррозионно-стойкие сплавы, включая нержавеющую сталь.
Приборы могут изготавливаться в корпусах малых (63 мм), средних (100 мм), и больших (160 мм) диаметров.
Мембранные показывающие дифференциальные манометры, как и приборы с мембранными коробками, используются для измерения малых значений дифференциального давления. Отличительная особенность – устойчивая работа при высоком статическом давлении.
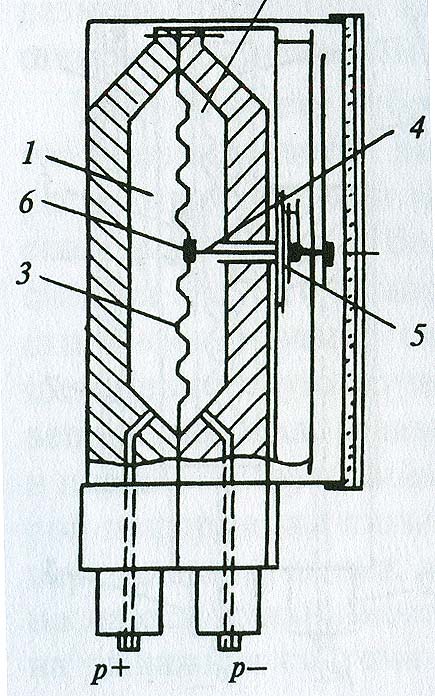
Рис. 2.25Мембранные показывающие дифференциальные манометры с вертикальной мембраной:
1 – «плюсовая» камера;
2 – «минусовая» камера;
3 – чувствительная гофрированная мембрана;
4 – передающий шток;
5 – передаточный механизм;
6 – предохранительный клапанДифманометр с вертикальной мембраной (Рис. 2.25) состоит из «плюсовой» 1 и «минусовой» 2 рабочих камер, разделенных чувствительной гофрированной мембраной 3. Под воздействием давления мембрана деформируется, в результате чего перемещается ее центр вместе с закрепленным на нем передающим штоком 4. Линейное смещение штока в передаточном механизме 5 преобразуется в осевое вращение трибки, и соответственно указательной стрелки, отсчитывающей на шкале прибора измеряемое давление.
Для сохранения работоспособности чувствительной гофрированной мембраны при превышении максимального допустимого статического давления предусмотрен открывающийся предохранительный клапан 6. Причем конструкции этих клапанов могут быть различны. Соответственно такие приборы не могут использоваться, когда не допускается контакт сред из «плюсовой» и «минусовой» камер.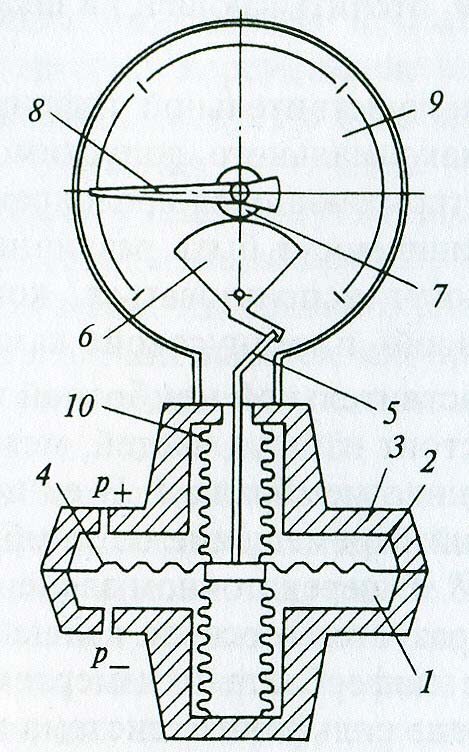
Рис. 2.26Мембранный показывающий дифференциальный манометр с горизонтальной мембраной:
1 – «плюсовая» камера;
2 – «минусовая» камера;
3 – входной блок;
4 - чувствительная гофрированная мембрана;
5 – толкатель;
6 – сектор;
7 – трибка;
8 – стрелка;
9 – циферблат;
10 – разделительный сильфонДифманометр с горизонтальной чувствительной мембраной показан на рис. 2.26. Входной блок 3 состоит из двух частей, между которыми устанавливается гофрированная мембрана 4. В ее центре закреплен толкатель 5, передающий перемещение от мембраны, через сектор 6, трибку 7 к стрелке 8. В этом передаточном звене линейное перемещение толкателя преобразуется в осевое вращение стрелки 8, отслеживающей на шкале циферблата 9 измеряемое давление. В этой конструкции применена сильфонная система вывода толкателя из зоны рабочего давления. Разделительный сильфон 10 своим основанием герметично закрепляется на центре чувствительной мембраны, а верхней частью также герметично прикрепляется к входному блоку. Такая конструкция исключает контакт измеряемой и окружающей сред.
Конструкция входного блока предусматривает возможность промывки или продувки «плюсовой» и «минусовой» камер и обеспечивает применение таких приборов для работы даже в условиях загрязненных рабочих сред.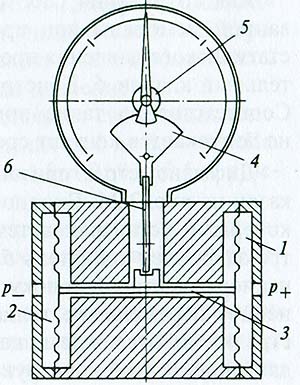
Рис. 2.27Мембранный двухкамерный показывающий дифманометр:
1 – «плюсовая» камера;
2 – «минусовая» камера;
3 – передающий шток;
4 – сектор;
5 – трибка;
6 – коромыслоДвухкамерная система измерения дифференциального давления применена в конструкции прибора, показанного на рис. 2.27. Измеряемые потоки среды направляются в «плюсовую» 1 и «минусовую» 2 рабочие камеры, основными функциональными элементами которых являются автономные чувствительные мембраны. Преобладание одного давления над другим приводит к линейному перемещению передающего штока 3, которое через коромысло 6 передается соответственно на сектор 4, трибку 5 и систему стрелочной индикации измеряемого параметра.
Дифманометры с двухкамерной системой измерения используются для измерения малых дифференциальных давлений при высоких статических нагрузках, вязких сред и сред с твердыми вкраплениями.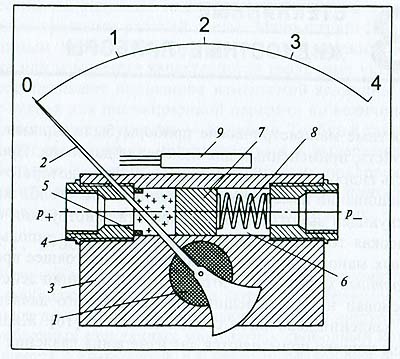
Рис. 2.28.Дифманометр с магнитным преобразователем:
1 – поворотный магнит;
2 – стрелка;
3 – корпус;
4 – магнитный поршень;
5 – фторопластовый сальник;
6 – рабочий канал;
7 – пробка;
8 – диапазонная пружина;
9 – блок электроконтактовПринципиально иной показывающий дифманометр изображен на рис. 2.28. Поворотный магнит 1, на торце которого установлена стрелка 2, размещен в корпусе 3, выполненном из немагнитного металла. Магнитный поршень, уплотненный фторопластовым сальником 5, может передвигаться в рабочем канале 6. Магнитный поршень 4 со стороны «минусового» давления подпирает пробка 7, в свою очередь поджимаемая диапазонной пружиной 8.
Среда «плюсового» давления через соответствующий подводящий штуцер воздействует на магнитный поршень и сдвигает его вместе с пробкой 7 по каналу 6 до уравновешивания такого смещения противодействующими силами – «минусовым» давлением и диапазонной пружиной. Движение магнитного поршня приводит к осевому вращению поворотного магнита и соответственно указательной стрелки. Такой сдвиг пропорционален перемещению стрелки. Полное согласование достигается подбором упругих характеристик диапазонной пружины.
В дифманометре с магнитным преобразователем предусмотрен блок 9, замыкающий и размыкающий соответствующие контакты при прохождении вблизи его магнитного поршня.
Приборы с магнитным преобразователем устойчивы к воздействию статического давления (до 10 МПа). Они обеспечивают относительно невысокую погрешность (примерно 2 %) в диапазоне функционирования до 0,4 Мпа и используются для измерения давления воздуха, газов, различных жидкостей.[ http://jumas.ru/index.php?area=1&p=static&page=razdel_2_3_2]
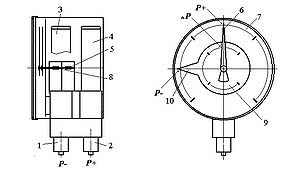
Показывающий дифференциальный манометр на основе трубчатой пружины1 и 2 – держатели;
3 и 4 – трубчатые пружины;
5 и 8 – трибки;
6 – стрелка «плюсового» давления;
7 и 9 – шкалы избыточного давления;
10 – стрелка «минусового» давленияВ приборах такого типа на автономных держателях 1 и 2, соединенных вместе, установлены трубчатые пружины. Каждый держатель вместе с трубчатым чувствительным элементом образовывают автономные измерительные каналы. Среда «плюсового» давления поступает через входной штуцер держателя 2 в трубку 4, деформирует ее овал, в результате чего перемещается наконечник трубки и это перемещение через соответствующий зубчатый сектор передается на трибку 5. Эта трибка соответственно приводит к отклонению указательной стрелки 6, которая показывает на шкале 7 значение «плюсового» избыточного давления.
«Минусовое» давление посредством держателя 1, трубчатой пружины 3, трибки 8 приводит к перемещению циферблата 9, объединенного со стрелкой 10, которая на шкале 7 отслеживает значение измеряемого параметра.Дифференциальные манометры (далее – дифманометры), как отмечалось в п.1.3, являются названием отнесенным в нашей стране к показывающим приборам. (Устройства, обеспечивающие электрический выходной сигнал, пропорциональный измеряемому дифференциальному давлению имеют название измерительных преобразователей разности давлений). Хотя отдельные производители, а также некоторые специалисты-эксплуатанционщики измерительные преобразователи разности давлений также называют дифманометрами.
Дифманометры нашли основное применение в технологических процессах для измерения, контроля, регистрации и регулирования следующих параметров:
· расхода различных жидких, газообразных и парообразных сред по перепаду давления на разного рода сужающих устройствах (стандартных диафрагмах, соплах, включая сопла Вентури) и дополнительно вводимых в поток гидро- и аэродинамических сопротивлениях, например на преобразователях типа Annubar или на нестандартных гидро- и аэродинамических препятствиях;
· перепада - разности давления, вакуумметрических, избыточных, в двух точках технологического цикла, включая потери на фильтрах систем вентиляции и кондиционирования воздуха;
· уровня жидких сред по величине гидростатического столба.
Согласно ГОСТ 18140–84/23/, предельные номинальные перепады давления дифманометров-расходомеров, верхние пределы или сумма абсолютных значений верхних пределов измерений дифманометров-перепадомеров должны приниматься из следующего ряда:
10; 16; 25; 40; 63; 100; 160; 250; 400; 630 Па;
1; 1,6; 2,5; 4; 6,3; 10; 16; 25; 40; 63; 100; 160; 250; 400; 630 кПа;
1; 1,6; 2,5; 4; 6,3 МПа.
У дифманометров-расходомеров верхние пределы измерений выбираются из ряда, определяемого выражением:
А = а × 10n, (2.7)
где а – одно из чисел следующего ряда: 1; 1,25; 1,6; 2,0; 2,5; 3,2; 4; 5; 6,3; 8; n – целое (положительное или отрицательное) число или нуль.
Верхние пределы измерений или сумма абсолютных значений верхних пределов измерений дифманометров-уровнемеров следует выбирать и ряда:
0,25; 0,4; 0,63; 1,0; 1,6; 2,5; 4,0; 6,3; 10; 16; 25; 40; 63; 100 и 160 метров.
Одной из важных характеристик дифманометров является предельно допустимое рабочее избыточное давление, т. е. избыточное давление, которое могут выдержать рабочие каналы без необратимой деформации чувствительных элементов. Такое значение параметра принимается из следующего ряда:
25; 40; 63; 100; 160; 250; 400 и 630 кПа;
1; 1,6; 2,5; 4; 6,3; 10; 16; 25; 32; 40 и 63 МПа.
Нижние пределы измерений дифманометров-расходо-меров из-за неустойчивости работы стандартных сужающих устройств при малых Числах Рейнольдса измеряемого потока не должны превышать 30 % шкалы прибора. У преобразователей Annubar этот предел не превышает 10 % при сохранении объявленного класса точности (1,0).
Классы точности дифманометров принимаются из ряда: 0,25; 0,5; 1,0; 1,5.
Дифманометры должны иметь линейную шкалу при измерении уровня или перепада, линейную или квадратичную – при измерении расхода.
Дифманометры могут иметь условные обозначения, предложенные в методике п.1.4. Указываются модель прибора, причем на первом месте в обозначении фиксируется измеряемый параметр – тип измерителя (дифманометр), затем – принцип измерения и функция, предельный номинальный перепад, избыточное рабочее давление, класс точности. Например, дифманометр сильфонный показывающий в корпусе диаметром 160 мм, на предельный номинальный перепад давления 630 кПа, с рабочим избыточным давлением 32 МПа, класса точности 1,5 обозначается как
ДСП 160 (0…630 кПа)-32 МПа-1,5.
После этого допускается указывать дополнительные обозначения, например исполнение по «IP», измеряемой среде, присоединительным линиям и т. д.
Специфика измерения дифференциального давления обусловливает наличие в дифманометрах устройств продувки импульсных линий без необходимости демонтажа прибора или его узлов.
При испытаниях, а также в нормальных условиях отечественные дифманометры, согласно требований производителя, должны обеспечивать заданные метрологические характеристики после выдержки не менее 6-ти часов при температуре окружающей среды:
20 ± 2 или 23 ± 2 оС – для приборов классов точности 0,5; 0,6 и 1;
20 ± 5 или 23 ± 5 оС – для приборов класса точности 1,5.
Современные конструкции из-за снижения металлоемкости и совершенствования преобразователей позволяют сокращать время температурной адаптации у некоторых моделей до нескольких десятков минут.
Конкретная температура приведена в ТУ на измеритель и должна регистрироваться в техническом описании или паспорте на прибор.
Дифманометры, не защищенные от одностороннего воздействия, должны выдерживать перегрузку со стороны среды «плюсового» давления, превышающую предельные номинальные перепады на 10…50 %. «Плюсовым», в противовес «минусовому», называют большее из двух давлений среды, поступающей на вход дифференциального манометра.
Конструкции, у которых предусмотрены односторонние перегрузки, должны выдерживать десятикратные, стократные или двухсот пятидесятикратные односторонние перегрузки/23/.
Показывающие дифференциальные манометры на основе трубчатой пружины находят широкое применение для визуализации расхода различных сред, гидродинамических потерь в системах теплового отопления.
Дифференциальное давление, т. е. разность давлений р отсчитывается стрелкой на шкале циферблата.
Дифманометры такого типа, исходя из особенностей трубчатых пружин, обеспечивают работоспособность в промышленных условиях в диапазоне от 0 до 100 МПа.[ http://jumas.ru/index.php?area=1&p=static&page=razdel2_2_4]
Тематики
Синонимы
EN
- differential gauge pressure
- differential manometer
- differential pressure gage
- differential pressure indicator
- differential-pressure gage
DE
FR
Русско-английский словарь нормативно-технической терминологии > дифференциальный манометр
10 скорость
speed
в механике - одна из основных характеристик движения материальной точки. — rate of motion. speed and velocity are often used interchangeably although some authorities maintain that velocity should be used only for the vector quantity.
- (вектор) (рис.124) — velocity (vel)
величина скорости в данном направлении, — а vector quantity equal to speed in a given direction.
- (темп изменения величины) — rate
- аварийного слива топлива (в воздухе) — fuel dumping /jettison/ rate. jettison rate for all tanks and all boost pumps operating is... kg per minute.
- аварийного слива топлива (производительность слива) порядка 2000 л/мин — fuel dump rate of 2000 liters per minute
- азимутальной коррекции (гироскопа) — azimuth erection rate
-, безопасная — safety speed
- бокового движения (вертолета) — sideward flight speed
- бокового перемещения (скольжения) — lateral velocity
скорость относительно невозмущенного воздуха в направлении поперечной оси. — the velocity relative to the undisturbed air in the direction of the lateral axis.
-, большая — high speed
-, большая (стеклоочистителя) — fast rate (fast)
"- велика" (надпись на указателе отклонения от заданной скорости прибора пкп) — fast
-, вертикальная — vertical speed
- вертикальная (для ссос) — descent /sink/ rate
-, вертикальная (при посадке) — descent velocity
with а limit descent velocity of... f.p.s. at the design landing weight...
- ветра (величина) — wind speed (ws)
скорость массы воздуха в горизонтальном направлении. — ws is horizontal velocity of а mass of air.
- ветра (величина и направление) (рис.124) — wind velocity
фактическая скорость ветра на высоте 50 фт. по сообщению) диспетчера. зафиксировать скорость и направление ветра. — the actual wind velocity at 50 foot height reported from the tower. record wind velocity and direction.
- ветра (название шкалы на графике) — wind
- ветра (сообщаемая диспетчерским пунктом или по метеосводке) — reported wind (speed)
- в зависимости от высоты и веса, вертикальная — vertical speed for altitude and weight
- взлета, безопасная (v2) — takeoff safety speed (v2)
скорость, достигаемая на первом этапе взлета, и выбираемая таким образом, чтобы обеспечить безопасное получение нормируемых градиентов набора высоты на втором этапе взлета. — the scheduled target speed to be attained at the 35 feet height with one engine inoperative.
- взлета, минимальная безопасная (v2 min) — minimum takeoff safety speed (v2 min)
наименьшая допустимая скорость на 1-м этапе взлета.
- взлета, минимально эволютивная (vmin эв) — air minimum control speed (v мса)
- в зоне ожидания — holding speed
- в момент отказа критического двигателя (при взлете) — critical engine failure speed (v1)
- в момент принятия решения (при взлете) — decision speed (v1)
-, воздушная — airspeed
скорость полета ла относительно воздуха, независимо от пути, пройденного относительно земной поверхности, — the rate of speed at which an aircraft is traveling through the atmosphere (air), and is independent of any distance covered on the surface of the earth.
- возникновения бафтинга — buffet (onset) speed
- возникновения бафтинга, предшествующего срыву — pre-stall buffet speed
- возникновения предупреждающей тряски (vтp) — pre-stall warning speed
скорость, при которой возникают заметные естественные или искусственно созданные признаки близости сваливания.
- возникновения флаттера — flutter (onset) speed
- восстановления (гироскопа) большая — fast erection rate
- вращения — rotational speed (n, n)
оборотов за единицу времени. — revolutions per unit time.
- вращения земли, угловая — earth('s) angular velocity
- вращения колеса (напр., при взлете) — tire speed. ; maximum takeoff weight restricted by tire speed
- в точке принятия решения — decision speed
- в точке принятия решения (при отказе критического двигателя) — critical engine failure speed
- встречного ветра — headwind speed
- встречного ветра (название шкалы на графике) — headwind
- в условиях турбулентности — rough air speed (vra)
- входа в зону турбулентности, заданная — target (air)speed for turbulent air penetration
-, выбранная заявителем — speed selected by the applicant
- выпуска (или уборки) шасси, максимальная — landing gear operating speed (vlo)
максимальная скорость полета, при которой разрешается выпускать или убирать шасси. — maximum speed at which it is safe to extend or retract the landing gear.
- выхода (гидросамолета, са молета-амфибии) на редан — hump speed. the speed at which the water resistance of a seaplane or amphibian is hignest.
- газового потока (через двиг.) — gas flow velocity
- герметизации кабины — cabin pressurization rate
-, гиперзвуковая — hypersonic speed
скорости от м-5 и выше. — pertaining to speeds of mach 5 or greater.
- горизонтального полета — level flight speed, speed in level flight
- горизонтального полета на максимальном продолжительном режиме (двиг.), максимальная — maximum speed in level flight with maximum continuous power
- горизонтального полета на расчетном режиме работы двигателей, максимальная — maximum speed in level flight with rated rpm and power
- движения назад (вертолета) — rearward (flight) speed
-, демонстрационная — demonstrated speed
- дисс (доплеровского измерителя скорости и сноса) — doppler velocity
- для определения характеристик устойчивости, максимальная — maximum speed for stability characteristic (vfc)
- горизонтального полета на режиме максимальной продолжительной мощности (тяги) — maximum speed in level flight with maximum continuous power (or thrust) (vh)
-, дозвуковая — subsonic speed
-, докритическая — pre-stall speed
-, допустимая — allowable speed
-, допустимая (ограниченная) — limiting speed
-, заданная воздушная — target airspeed
- заданная подвижным индексом — bug speed. fuel dumping may be necessary to reduce the bug speed.
- заправки топливом — fueling rate, fuel delivery rate
- захода на посадку (vзп) — approach speed (vapp)
- захода на посадку при всех работающих двигателях — approach speed with all engines operating
- захода на посадку при одном неработающем двигателе — approach speed with one engine inoperative
- захода на посадку с убранными закрылками — no flap approach speed
- захода на посадку с убранными закрылками и предкрылками — no flap-no slat approach speed. аn approach speed of 15 knots below no flap-no slat approach speeds can be used.
- захода на посадку с убранными предкрылками — no slat approach speed. with the leading edge slats extended, an approach speed of 15 knots below no flap - no slat approach speeds can be used.
-, звуковая — sonic speed
скорость ла или его части. равная скорости звука в данных условиях. — the speed of sound. when an object travels in air at the same speed as that of sound in the same medium.
-, земная индикаторная (v13) (из) — calibrated airspeed (cas)
- изменения (величины) — rate (of change)
- изменения бокового отклонения — crosstrack (distance) deviation rate, xtk deviation rate
- изменения шага (винта) — pitch-change rate
-, индикаторная воздушная — equivalnet airspeed (eas)
-, индикаторная земная (v13, из) (сша) — calibrated airspeed (cas)
равна показанию указателя скорости (приборной скорости) с учетом аэродинамической поправки (и инструментальной погрешности). напр., 150 км/ч из. — airspeed indicator reading, as installed in airplane, corrected for (static source) position (and instrument) error. cas is equal to the tas in standard atmosphere at sea level.
-, индикаторная земная (англ.) — rectified air speed (ras). ras is the indicated airspeed corrected for instrument and position errors.
- истечения выходящих газов (из реактивного сопла газотурбинного двигателя) — exhaust velocity, speed of ехhaust gases. the velocity of gaseous or other particles (exhaust stream) that exhaust through the nozzle.
-, истинная воздушная (ис) — true airspeed (tas)
скорость самолета относительно невозмущенного воздуха, равная скорости. — the speed of the airplane relative to undisturbed air.
-, истинная воздушная (по числу m) — true mach number (m)
показания указателя числа м c учетом аэродинамической поправки для приемника статического давления. — machmeter reading corrected for static source position error.
- касания (при посадке) — touch-down speed
- коррекции гироскопа — gyro erection rate
- коррекции гироскопа в азимуте — gyro azimuth erection rate
- коррекции гироскопа по крену и тангажу — gyro roll/pitch erection rate
- крейсерская — cruising speed
скорость полета, не превышающая 90 % расчетной скорости горизонтального полета. — а speed not greater than 90 % of the design level speed.
-, крейсерская расчетная — design cruising speed (vc)
- крена, угловая — rate of roll, roll rate
-, критическая (сваливания) — stalling speed (vs)
-, линейная — linear velocity
скорость в заданном направлении для определения скорости. — speed acting in one specified direction defines velocity.
-, линейная (скорость движения no прямой) — linear speed. rate of motion in a straight iine.
-, максимальная допустимая эксплуатационная (no терминологии икао) — maximum permissible operating speed
-, максимальная маневренная — maneuvering speed (va)
нe допускать максимального отклонения поверхности управления при превышении максимальной маневренной скорости. — maximum deflection of flight controls should not be used above va.
-, максимальная посадочная (vп max) — maximum landing speed
-, максимальная предельнодопустимая — maximum operating limit speed
-, максимальная предельнодопустимая, приборная — maximum operating limit indicated airspeed (ias)
-, максимальная эксплуатационная — maximum operating limit speed (vmo)
- максимально допустимая (vмд) — maximum operating limit speed (vmo)
- максимальной продопжительности (полета) — high-endurance cruise speed
"- мала" (надпись на указателе отклонения от заданной скорости прибора пкп) — slow
-, малая — low speed
-, малая (стеклоочистителя) — slow rate (slow)
-, минимальная — minimum speed
наименьшая установившаяся скорость горизонтального полета на высоте, значительно превышающей размер крыла, при любом режиме работы двигателей, — the lowest steady speed which can be maintained by an airplane in level flight at an altitude large in comparison with the dimension of the wings, with any throttle setting.
-, минимальная (полетная) — minimum flying speed
наименьшая установившаяся скорость, выдерживаемая при любом режиме работы двигателей в горизонтальном полете на высоте, превышающей размах крыла, — the lowest steady speed that can be maintained with any throttle setting whatsoever, by an airplane in level flight at an altitude above the ground, greater than the span of the wing.
-, минимальная посадочная (vп min) — minimum landing speed
-, минимально эволютивная (vminэ) — minimum control speed (vmc)
скорость, при которой в случае отказа критического двигателя обеспечивается возможность управления самолетом для выдерживания прямолинейного полета на данной скорости, при нулевом рыскании и угле крена не более 5°. — vmc is the speed at which, when the critical engine is suddenly made inoperative at that speed, it is possible to recover control of the airplane with the engine still inoperative and to maintain it in straight flight at that speed, either with zero yaw or with an angle of bank not in excess of 5°.
-, минимально эволютивная (в воздухе) (vminэв) — air minimum control speed (vmca)
минимальная скорость полета, при которой обеспечивается управление самолетом с макс. креном до 5° в случае отказа критического двигателя и при работе остальных двигателей на взлетном режиме. — the minimum flight speed at which the airplane is controllable with а maximum of 5 deg. bank when the critical engine suddenly becomes inoperative with the remaining engines at take-off thrust.
-, минимально эволютивная (на земле) (vmin эр) — ground minimum control speed (vmcg)
минимальная скорость разбега, обеспечивающая продолжение взлета, с использеванием только аэродинамических поверхностей правления, в случае отказа критич. двиг. и при работе остальных двигателей на взлетном режиме. — the minimum speed on the ground at which the takeoff can be continued, utilizing aerodynamic controls alone, when the critical engine suddenly becomes inoperative with the remaining engines at takeoff thrust.
-, минимально эволютивная (при начальном наборе высоты) — minimum control speed (at takeoff climb)
-, минимально эволютивная (у земли) — minimum control speed near ground
-, минимально допустимая эксплуатационная — minimum operating speed
- набора высоты (вдоль траектории) — climb speed
- набора высоты (вертикальная) — rate of climb
при проверке летных характеристик - вертикальная составляющая возд. скор. в условиях станд. атмосферы. в обычном полете - скорость удаления от земной поверхности. — in performance testing, the vertical component of the air speed in standard atmosphere. in general flying, the rate of ascent from tfle earth.
- набора высоты на маршруте — enroute climb speed
- набора высоты, начальная — initial climb-out speed
- набора высоты с убранными закрылками — flaps up climb(ing) speed, no flap climb speed
- на высоте 15м, посадочная — landing reference speed (vref)
минимальная скорость на высоте 15м при нормальной посадке. — the minimum speed at the 50 foot height in a normal landing.
- нагрева — heating rate
- наибольшей дальности — best range cruise speed
- наибольшей продолжительности полета — high-endurance cruise speed
- наивыгоднейшего набора высоты — speed for best rate of climb (vy)
- наивыгоднейшего угла траектории набора высоты — speed for best angle of climb (vx)
- на маршруте — еп route speed
- на режиме максимальной дальности, крейсерская — long-range cruise speed
- на режиме наибольшей дальности — best range cruise speed
- на режиме наибольшей продолжительности — high-endurance cruise speed
- начала изменения положения механизации (при взлете,v3) — speed at start of extendable (high-lift) devices retraction (v3)
- начала подъема передней опоры (при взлете) — rotation speed (vr)
- начала торможения (vн.т.) — brake application speed, speed at start of (wheel) brakes application
- начального набора высоты — initial climb speed, climb-out speed
- начального набора высоты (v4) (в конце полной взлетной дистанции) — initial climb speed (v4)
- начального набора высоты, установившаяся — steady initial climb speed. take-off safety speed, v2, at 35 feet shall be consistent with achievement of smooth transition to steady initial climb speed, v4 at height of 400 feet.
- (максимальная), непревышаемая — never exceed speed (vne)
-, нормируемая — rated speed
- обнаружения (искомого) светила (звезды) телескопом (астрокорректора) — star-detection rate of telescope
- образования (напр., льда) — rate of (ice) formation
-, ограниченная заявителем — speed selected by the applicant
the approach and landing speeds must be selected by the applicant.
-, ограниченная энергоемкостью тормозов — maximum brake energy speed (vmbe)
максимальная скорость движения самолета по земле, при которой энергоемкость тормозов сможет обеспечить полную остановку самолета, — the maximum speed on the ground from which a stop can be accomplished within the energy capabilities of the brakes.
-, околозвуковая — transonic speed
скорость в диапазоне от м = 0,8 - 1,2. — speed in а range of mach 0.8 to 1.2.
-, окружная — circumferential speed
-, окружная (конца лопасти) — tip speed
-, окружная (тангенциальная, касательная) — radial velocity. doppler effect in terms of radial velocity of a target.
-, опасная (самолета, превышающая vмо/mмо) — aircraft overspeed (а/с ovsp). speed exceeding vmo/mmo
- определяется для гладкой, сухой впп с жестким покрытием — vi speed is based on smooth, dry, hard surfaced runways
-, оптимальная — best speed
- отказа критического двигателя (при взлете) — critical engine failure speed (v1)
скорость, при которой после обнаружения отказавшего двигателя, дистанция продолжительного взлета до высоты 10,7 м не превышает располагаемой дистанции взлета, или дистанция до полной остановки не превышает располагаемой дистанции прерванного взлета, — the speed at which, when an engine failure is recognized, the distance to continue the takeoff to а height of 35 feet will not exceed the usable takeoff distance or, the distance to bring the airplane to а full stop will not exceed the accelerate-stop distance available.
- (сигнал) от доплеровской системы — doppler velocity
- от измерителя дисс (доплеровский измеритель путевой скорости и сноса), путевая — gappier ground speed (gsd)
- откачки (слива) топлива (на земле) — defueling rate, fuel off-loading rate
- отклонения закрылков — rate of the flaps motion
- отклонения от глиссады — glide slope deviation rate
- отклонения поверхности ynравления — control surface deflection rate
-, относительная — relative speed, speed of relative movement
motion of an aircraft relative to another.
- отработки (скорость изменения индикации прибора в зависимости от изменения параметра) — response rate /speed/, rate of response
- отработки астропоправки по курсу — rate /speed/ of response to celestial correction to azimuth e rror
- отработки поправки — correction response rate /speed/
- отработки сигнала — signal response rate
- отрыва (ла) — lirt-off speed (vlof:)
скорость в момент отрыва основных опорных устройств самолета от впп по окончании разбега при взлете (vотр.). — vlof is the speed at which the airplane first becomes airborne.
- отрыва колеса (характеристика тормозного колеса) — wheel unstick speed
-, отрыва, минимальная — minimum unstick speed (vmu)
устаназливается разработчиком (заявителем), как наименьшая скор, движения самолета на взлете, при которой еще можно производить отрыв самолета и затем продолжать взлет без применения особых методов пилотирования. — the speed selected by the applicant at and above which the airplane can be made to lift off the ground and сопtinue the take-off without displaying any hazardous characteristics.
- отрыва носового колеса (или передней стойки шасси) (vп.oп) — rotation speed (vr)
скорость начала преднамеренного увеличения угла тангажа при разбеге (рис. 113). — the speed at which the airplane rotation is initiated during the takeoff.
vr is the speed at which the nosewheel is raised and the airplane is rotated to the lift off attitude.
- отрыва передней опоры при взлете (vп.оп) — rotation speed
- перевода в набор высоты (после взлета) — initial climb speed
- перемещения органа управления — rate of control movement /displacement/
- пересечения входной кромки впп (vвк) — threshold speed (vt)
скорость самолета, с которой он пролетает над входной кромкой впп.
- пересечения входной кромки впп, демонстрационная — demonstrated threshold speed
- пересечения входной кромки впп, максимальная (vвк max.) — maximum threshold speed (vmt)
- пересечения входной кромки впп, намеченная (заданная) — target threshold speed (vtt). target threshold speed is the speed which the pilot aims to reach when the airplane crosses the threshold.
- пересечения входной кромки впп при нормальной работе всех двигателей (vвкn) — threshold speed with all еngines operating
- пересечения входной кромки впп при нормальной работе всех двигателей, намеченная (заданная) — target threshold speed with all engines operating
- пересечения входной кромки впп с двумя неработающими двигателями (vвк n-2) — threshold speed with two еngines inoperative
- пересечения входной кромки впп с одним неработающим двиг. (vвкn-1) — threshold speed with one еngine inoperative
- пересечения входной кромки впп с одним неработающим двигателем, намеченная (заданная) — target threshold speed with one engine inoperative
- пикирования — diving speed
- пикирования, демонстрационная — demonstrated flight diving speed (vdf)
-, пикирования, расчетная — design diving speed (vd)
- планирования — gliding speed
- планирования при заходе на посадку — gliding approach speed
- по азимуту, угловая — rate of turn
- поворота, угловая — rate of turn
- подъема передней опоры (стойки) шасси — rotation speed (vr)
скорость начала увеличения yгла тангажа на разбеге, преднамеренно создаваемого отклонением штурвала на себя для вывода самолета на взлетный угол атаки (vп.ст.). — the speed at which the airplane rotation is initiated during the takeoff, to lift /to rise/ the nose gear off the runway.
- поиска (искомой) звезды телескопом — (target) star detection rate of telescope
detection rate is the ratio of field of view to detection time.
-пo курсу, угловая — rate of turn
- полета — flight speed
- полета в болтанку — rough air speed (vra)
- полета в зоне ожидания — holding speed
- полета в неспокойном (турбулентном) воздухе — rough air speed (vra)
- полета для длительных режимов, наибольшая (vнэ) — normal operating limit speed (vno)
- полета, максимальная — maximum flying speed
- полета на наибольшую дальность крейсерская — best range cruise speed
- полета на наибольшую продолжительность — high-endurance cruise speed
- полета на режиме максимальной продолжительной мощности — speed (in flight) with maximum continuous power (or thrust)
- полета при болтанке — rough air speed (vra)
- полета с максимальной крейсерской тягой — speed (in flight) with maximum cruise /cruising/ thrust
-, пониженная — reduced (air) speed
при невозможности уборки створок реверса тяги продолжайте полет на пониженной скорости. — if reverser cannot be stowed, continue (flight) at reduced speed.
- по прибору (пр) — indicated airspeed (ias)
- попутного ветра — tailwind speed
- попутного ветра (название шкалы на графике) — tailwind
- порыва ветра — gust velocity
-, посадочная (vп) — landing speed
скорость самолета в момент касания основными его опорными устройствами поверхности впп — the minimum speed of an airplane at the instant of contact with the landing area in a normal landing.
-, посадочная (на высоте 15м) — landing reference speed (vref)
минимальная скорость на высоте 50 фт в условиях нормальной посадки, равная 1.3 скорости сваливания в посадочной конфигурации ла. — the minimum speed at 50 foot height in normal langin. equal to (1.3) times the stall speed in landing configuration.
-, постоянная — constant speed
-, поступательная (скорость движения вертолета вперед) — forward speed. steady angle of helicopter glide must be determined in autorotation, and with the optimum forward speed.
- по тангажу, угловая — rate of pitch
- потока газа (проходящего через двигатель, в фт/сек) — gas flow velocity (fps), vel f.p.s.
-, предельная (vпред.) — maximum operating limit speed (vmo)
скорость, преднамеренное превышение которой не допускается на всех режимах полета (набор высоты, крейсерский полет, снижение), кроме особо оговоренных случаев, допускаемых при летных испытаниях или тренировочных полетах. — speed that may not be deliberately exceeded in any regime of normal flight (climb, cruise or descent), unless а higher speed is authorized for flight test or pilot training operations.
-, предельно (свободно падающего тела) — terminal velocity
-, предельная (скорость самолета, превышающая допустимые ограничения vmo/mmo) — aircraft overspeed (а/с ovsp) а/с ovsp annunciator warns of exceeding air speed limitations (vmo/mmo)
-, предельно допустимая эксплуатационная (vпред.) — maximum operating limit speed (vmo)
- прецессии (гироскопа) — precession rate
- приближения (сближения) — closure rate
- приближения к земле (чрезмерная) — (excessive) closure rate to terrain, excessive rate of descent with respect to terrain
-,приборная воздушная (vпр) (пр) — indicated airspeed (ias)
показания указателя скорости, характеризующие величину скоростного напора, а не скорость перемещения самолета (напр.,150 км/ч пр). — airspeed indicator reading, as installed in the airplane, uncorrected for airspeed indicator system errors.
- приборная исправленная с учетом аэродинамической поправки и инструментальной погрешности прибора — calibrated airspeed (cas)
- при включении и выключении реверса тяги, максимальная — maximum speed for extending and retracting the thrust reverser, thrust reverser operating speed
- при включении стеклоочистителей лобовых стекол — windshield wiper operation speed
(т.е., скорость полета, при которой разрешается включать стеклоочистители) — do not operate the w/s wipers at speed in excess of... km/hr.
- при включении тормозов (при пробеге) — brake-on speed
- при выпуске воздушных тормозов — speed brake operating speed (vsb)
- при выпуске (уборке) посадочной фары — landing light operation speed
- при выпущенных интерцепторах (спойлерах), расчетная максимальная — design speller extended speed
- при выпуске (уборке) шасси, максимальная — maximum landing gear operating speed (vlo)
- при заходе на посадку и посадке, минимальная эволютивная — minimum control speed at арpreach and landing (vmcl)
- при (напр., взлетной) конфигурации самолета — speed in (takeaff) configuration
- при максимальной силе порыва ветра, расчетная — design speed for maximum gust intensity (vb)
- при максимальных порывах ветра, расчетная — design speed for maximum gust intensity
- при наборе высоты — climb speed
- при наборе высоты, наивыгоднейшая (оптимальная) — best climb speed
- при наборе высоты по маршруту на конечном участке чистой траектории — еn route climb speed at final net flight path segment
- принятия решения (v1) — (takeoff) decision speed (v1), critical engine failure speed (v1)
наибольшая скорость разбега самолета, при которой в случае отказа критич. двиг. (отказ распознается на этой скорости) возможно как безопасное прекращение, так и безопасное продолжение взлета. (рис. 113) — the speed at which, when an engine failure is recognized, the distance to continue the takeoff to а height of 35 feet will not exceed the usable takeoff distance, or, the distance to bring the airplane to а full stop will not exceed the accelerate-stop distance available.
- принятия решения относительная (v1/vr) — engine failure speed ratio (v1/vr ratio)
отношение скорости принятия решения v1 к скорости подъема передней стойки шасси vr. — the ratio of the engine failure speed, v1, for actual runway dimensions and conditions, to the rotation speed, vr
- принятия решения (v1), принятая при расчете макс. допустимого взлетного веса — critical engine failure speed (v1) assumed for max. allowable take-off weight max, allowable т.о. wt is derived from the corresponding critical engine failure speed (v1).
- при отказе критического двигателя (при взлете) — critical engine failure speed (v1)
- при отрыве носового колеса (см. скорость подъема передней опоры) (рис. 113) — rotation speed (vr)
- при предпосадочном маневре — (approach) pattern speed. overshooting the turn on final approach may occur with the higher (approach) pattern speed.
- при снижении — speed in descent
- при экстремальном снижении — emergency descent speed
- проваливания (резкая потеря высоты) — sink rate
- продольной составляющей ветра (график) — wind component parallel to flight path
- прохождения порога, максимальная — maximum threshold speed
- путевая (w) — ground speed (gs)
скорость перемещения самолета относительно земной поверхности, измеряемая вдоль линии пути. — aircraft velocity relative to earth surface measured along the present track.
- разбега, мннимально-эволю тивная (vmin эр) — round minimum control speed vmcg)
- разгерметизации — rate of decompression
- раскрытия (парашюта), критическая — critical opening speed
- рассогласования — rate of disagreement
-, расчетная — design speed
-, расчетная предельная (пикирования) — design diving speed (vd)
-, расчетная крейсерская — design cruising speed (vc)
-, расчетная маневренная — design maneuvering speed (va)
максимальная скорость, при которой максимальное отклонение поверхностей управления (элеронов,ph. рв) не вызывает опасных напряжений в конструкции ла. — the maximum speed at which application of full available aileron, rudder or elevator will not overstress the airplane.
- реакции — reaction rate
- реверса (поверхностей) управления — reversal speed
минимальная индикаторнаявоздушная скорость при которой возникает реверс поверхностей управления. — the lowest equivalent air speed at which reversal of control occurs.
-, рекомендованная изготовителем — manufacturer's recommended speed
-, рейсовая — block speed
-, рулежная — taxiing speed
- рыскания, угловая — rate of yaw, yaw rate
- сближения — closure /closing/ rate /speed/, rate of closure
скорость с которой два объекта приближаются друг к другу. — the speed at which two bodies approach each other.
- сближения с землей, опасная (чрезмерная) — excessive closure rate to terrain
- сваливания (vс) — stalling speed (vs)
скорость сваливания определяется началом сваливания самолета при заданных: конфигурации самолета, его полетном весе и режиме работы двигателей. — means the stalling speed or the minimum steady flight speed at which the airplane is controllabie.
- сваливания, минимальная (vсmin.) — minimurn stalling speed
- сваливания, приборная — indicated stalling speed
the indlcalcid air speed at the stall.
- сваливания при посадочной конфигурации (vсо) — stalling speed (vso). stalling speed or minimum steady flighl speed in landing configuration.
- сваливания при наработающих двигателях — power-off stalling speed
- сваливания при работающих двигателях — power-off stalling speed
- сваливания при рассматриваемой конфигурации самолета (vс1) — stalling speed (vs1). stalling speed or minimum steady. flight speed obtained in a specified configuration.
- сваливания с закрылками в посадочном положении, минимальная — minimum stalling speed with wing-flaps in landing setting
-, сверхзвуковая — supersonic speed
скорость, превышающая скорость звука, — pertaining to, or dealing with, speeds greater than the acoustic velocity.
- с выпущенными закрылками, максимальная — maximum flap extended speed (vfe)
- с выпущенными шасси, максимальная — maximum landing gear extended speed (vle)
максимальная скорость, при которой разрешается полет с выпущенным шасси, — maximum speed at which the airplane can be safety flown with the landing gear extended.
- скоса потока вниз — downwash velocity
- слежения за изменением высоты (корректором высоты) — rate of response to altitude variation /change/
- слива (откачки) топлива (на земле) — defueling rate, fuel off-loading rate
- снижения — speed of /in/ descent
-, снижения (напр., при посадке) — rate of sink, sink rate. touchdown at minimum rate of sink.
- снижения, вертикальная — rate of descent, descent /sink/ rate
- снижения в момент касания (водной поверхности при аварийной посадке на воду) — impact sink speed. the impact sink speed should be kept below 100 fpm to minimize the risk of a primary fuselage structural failure.
- снижения парашюта — parachute rate of descent
- снижения парашютов с единичным грузом — rate of descent of single cargo parachutes
- снижения, чрезмерная — excessive rate of descent, excessive sink rate
- сноса — drift rate
- согласования (гироагрегата) — rate of slaving, slaving rate
- согласования следящих сиетем (инерциальной системы) — servo loop slaving rate
- с отказавшим критическим двигателем, минимальная эеолютивная — minimum control speed with the critical engine inoperative (vmc)
- с полностью убранными закрылками, посадочная — zero flap landing speed
zero flap landing ground speeds are obviously high so fuel dumping may be necessary to reduce the bug speed.
- спуска, вертикальная — rate of sink, sink rate
touchdown at minimum rate of sink. perform high sink rate maneuver.
-, средняя — average speed
-, средняя эксплуатационная (коммерческая) — block speed
- срыва (см. скорость сваливания) — stalling speed (vs)
- схода (ракеты) с направляющей — launch(ing) speed
- тангажа, угловая — rate of pitch, pitch rate
-, текущая — current speed
ete calculation is based on current ground speed.
- (уборки) выпуска шасси, максимальная — maximum landing gear operating speed (vlo)
-, угловая — angular velocity
изменение угла за единицу времени, — the change of angle per unit time.
-, угловая — angular speed, angular rate, angular velocity
изменение направления за единицу времени, напр., отметки (цели) на экране радиолокатора. — change of direction per unit time, as for a target on a radar screen.
-, угловая инерционная (корпуса гироскопа относительно к-л. оси) — nertial angular velocity (of gyro case about the indicated axis)
-, угловая, (координатного сопровождающего) трехгранника (относительно земли) — angular velocity of moving соordinate trihedral
- у земли, минимальная эволютивная — minimum control speed near ground
-, установившаяся — steady speed
- установившегося полета, минимальная — minimum steady flight speed
- установившегося разворота, угловая — sustained turn rate (str)
- ухода гироскопа — gyro drift rate
- ухода гироскопа в азимуте — azimuth drift rate of the gyro
- флаттера, критическая — flutter speed
наименьшая индикаторная скорость, при которой возникает флаттер, — the lowest equivalent air speed at which flutter occurs.
"(-) число м" (кнопка) — v/m (button or key)
-, эволютивная (минимальная) — (minimum) control speed (vmc)
- эволютивная разбега, минимальная (vmin эр) — ground minimum control speed (vmcg)
-, экономическая — economic speed
скорость полета, при которой обеспечивается минимальный расход топлива на единицу пути в спокойном воздухе. — the flight speed at which the fuel consumption per unit of distance covered in still air, is а minimum.
-, экономическая крейсерская — economic cruising speed
-, эксплуатационная — operating speed
гашение с. — deceleration
на с. км/час — at а speed of km/hr
набор с. — acceleration
на полной с. — at full speed
нарастание с. — acceleration
переход к с. (набора высоты) — transition to (climb) speed
при с. км/час — at а speed of km/hr
разгон (ла) до с. — acceleration to speed of...
уменьшение с. (процесс) — deceleration
выдерживать с. (точно) — maintain /hold/ speed (accurately)
выражать значение с. полета в виде приборной (индикаторной) скорости — state (he speeds in terms of ias (eas)
гашение с. (перед выравниванием) — speed bleed-off (before flare)
гасить с. — decelerate
достигать с. (величина) — attain а speed of (... km/hr)
достигать с. (обозначание) — reach the speed (v1)
задавать с. — set up (speed, rate)
задавать с. км/час (при проверке барометрических приборов на земле) — apply pressure corresponding to а speed of... km/hr
набирать с. — gain /pick up/ speed, accelerate
увеличивать с. — increase speed, accelerate
уменьшать с. — decrease speed, decelerate
устанавливать с. (полета) — set up speedРусско-английский сборник авиационно-технических терминов > скорость
11 сегмент
сегмент
1. Электронное соединение между двумя сетевыми устройствами.
2. В структурированных сетях - физический набор оконечных станций (пользователи и элементы сети), формирующих область коллизий Ethernet. Границы области коллизий определяются мостами или маршрутизаторами.
3. Внутренняя магистраль в концентраторе Ethernet. Более корректное название backplane segment.
4. Порт или группа портов, соединенных вместе. Сегменты Ethernet могут быть изолированными, локальными, магистральными (внутри концентратора) или каскадируемыми. Сегменты Token Ring изолированными, локальными или магистральными (внутри концентратора).
[ http://www.lexikon.ru/dict/net/index.html]Тематики
EN
3.34 сегмент (segment): Логическая группа элементов данных, логическая часть сообщения электронного обмена данными (EDI) или сообщения для носителей высокой емкости для автоматического сбора данных.
Источник: ГОСТ Р ИСО 22742-2006: Автоматическая идентификация. Кодирование штриховое. Символы линейного штрихового кода и двумерные символы на упаковке продукции оригинал документа
3.7.3 сегмент (segment): Одна из малых поверхностей, на которые разбивают элемент поверхности (см. рисунок 2).
Примечание - Понятие «сегмент» вводят для определения траектории и времени сканирования по элементу поверхности.
Источник: ГОСТ 30457.3-2006: Акустика. Определение уровней звуковой мощности источников шума по интенсивности звука. Часть 3. Точный метод для измерения сканированием оригинал документа
20. Сегмент
Segment
Совокупность примитивов вывода, которой можно манипулировать как единым целым.
Примечание. Сегмент может состоять из нескольких отдельных точек, отрезков линий или других примитивов вывода
Источник: ГОСТ 27459-87: Системы обработки информации. Машинная графика. Термины и определения оригинал документа
Русско-английский словарь нормативно-технической терминологии > сегмент
12 выделитель канальных цифровых сигналов электросвязи
выделитель канальных цифровых сигналов электросвязи
выделитель
Устройство предназначенное для вывода требуемых канальных цифровых сигналов электросвязи из многоканального цифрового сигнала электросвязи.
Примечание
Выделитель канальных цифровых сигналов электросвязи получает название в зависимости от используемого разделительного признака, например временной выделитель канальных цифровых сигналов электросвязи.
[ ГОСТ 22670-77]Тематики
Синонимы
EN
166. Выделитель канальных цифровых сигналов электросвязи
Выделитель
Channel digital signal extractor
Источник: ГОСТ 22670-77: Сеть связи цифровая интегральная. Термины и определения оригинал документа
Русско-английский словарь нормативно-технической терминологии > выделитель канальных цифровых сигналов электросвязи
13 технология коммутации
технология коммутации
-
[Интент]Современные технологии коммутации
[ http://www.xnets.ru/plugins/content/content.php?content.84]Статья подготовлена на основании материалов опубликованных в журналах "LAN", "Сети и системы связи", в книге В.Олифер и Н.Олифер "Новые технологии и оборудование IP-сетей", на сайтах www.citforum.ru и опубликована в журнале "Компьютерные решения" NN4-6 за 2000 год.
- Введение
- Коммутация первого уровня.
- Коммутация второго уровня.
- Коммутация третьего уровня.
- Коммутация четвертого уровня.
- Критерии выбора оборудования, физическая и логическая структура сети
- Качество обслуживания (QoS) и принципы задания приоритетов
- Заключение
Введение
На сегодня практически все организации, имеющие локальные сети, остановили свой выбор на сетях типа Ethernet. Данный выбор оправдан тем, что начало внедрения такой сети сопряжено с низкой стоимостью и простотой реализации, а развитие - с хорошей масштабируемостью и экономичностью.
Бросив взгляд назад - увидим, что развитие активного оборудования сетей шло в соответствии с требованиями к полосе пропускания и надежности. Требования, предъявляемые к большей надежности, привели к отказу от применения в качестве среды передачи коаксиального кабеля и перевода сетей на витую пару. В результате такого перехода отказ работы соединения между одной из рабочих станций и концентратором перестал сказываться на работе других рабочих станций сети. Но увеличения производительности данный переход не принес, так как концентраторы используют разделяемую (на всех пользователей в сегменте) полосу пропускания. По сути, изменилась только физическая топология сети - с общей шины на звезду, а логическая топология по-прежнему осталась - общей шиной.
Дальнейшее развитие сетей шло по нескольким путям:- увеличение скорости,
- внедрение сегментирования на основе коммутации,
- объединение сетей при помощи маршрутизации.
Увеличение скорости при прежней логической топологии - общая шина, привело к незначительному росту производительности в случае большого числа портов.
Большую эффективность в работе сети принесло сегментирование сетей с использованием технология коммутации пакетов. Коммутация наиболее действенна в следующих вариантах:
Вариант 1, именуемый связью "многие со многими" – это одноранговые сети, когда одновременно существуют потоки данных между парами рабочих станций. При этом предпочтительнее иметь коммутатор, у которого все порты имеют одинаковую скорость, (см. Рисунок 1).
Вариант 2, именуемый связью "один со многими" – это сети клиент-сервер, когда все рабочие станции работают с файлами или базой данных сервера. В данном случае предпочтительнее иметь коммутатор, у которого порты для подключения рабочих станций имеют одинаковую небольшую скорость, а порт, к которому подключается сервер, имеет большую скорость,(см. Рисунок 2).

Когда компании начали связывать разрозненные системы друг с другом, маршрутизация обеспечивала максимально возможную целостность и надежность передачи трафика из одной сети в другую. Но с ростом размера и сложности сети, а также в связи со все более широким применением коммутаторов в локальных сетях, базовые маршрутизаторы (зачастую они получали все данные, посылаемые коммутаторами) стали с трудом справляться со своими задачами.
Проблемы с трафиком, связанные с маршрутизацией, проявляются наиболее остро в средних и крупных компаниях, а также в деятельности операторов Internet, так как они вынуждены иметь дело с большими объемами IP-трафика, причем этот трафик должен передаваться своевременно и эффективно.
С подключением настольных систем непосредственно к коммутаторам на 10/100 Мбит/с между ними и магистралью оказывается все меньше промежуточных устройств. Чем выше скорость подключения настольных систем, тем более скоростной должна быть магистраль. Кроме того, на каждом уровне устройства должны справляться с приходящим трафиком, иначе возникновения заторов не избежать.
Рассмотрению технологий коммутации и посвящена данная статья.Коммутация первого уровня
Термин "коммутация первого уровня" в современной технической литературе практически не описывается. Для начала дадим определение, с какими характеристиками имеет дело физический или первый уровень модели OSI:
физический уровень определяет электротехнические, механические, процедурные и функциональные характеристики активации, поддержания и дезактивации физического канала между конечными системами. Спецификации физического уровня определяют такие характеристики, как уровни напряжений, синхронизацию изменения напряжений, скорость передачи физической информации, максимальные расстояния передачи информации, физические соединители и другие аналогичные характеристики.
Смысл коммутации на первом уровне модели OSI означает физическое (по названию уровня) соединение. Из примеров коммутации первого уровня можно привести релейные коммутаторы некоторых старых телефонных и селекторных систем. В более новых телефонных системах коммутация первого уровня применяется совместно с различными способами сигнализации вызовов и усиления сигналов. В сетях передачи данных данная технология применяется в полностью оптических коммутаторах.Коммутация второго уровня
Рассматривая свойства второго уровня модели OSI и его классическое определение, увидим, что данному уровню принадлежит основная доля коммутирующих свойств.
Определение. Канальный уровень (формально называемый информационно-канальным уровнем) обеспечивает надежный транзит данных через физический канал. Канальный уровень решает вопросы физической адресации (в противоположность сетевой или логической адресации), топологии сети, линейной дисциплины (каким образом конечной системе использовать сетевой канал), уведомления о неисправностях, упорядоченной доставки блоков данных и управления потоком информации.
На самом деле, определяемая канальным уровнем модели OSI функциональность служит платформой для некоторых из сегодняшних наиболее эффективных технологий. Большое значение функциональности второго уровня подчеркивает тот факт, что производители оборудования продолжают вкладывать значительные средства в разработку устройств с такими функциями.
С технологической точки зрения, коммутатор локальных сетей представляет собой устройство, основное назначение которого - максимальное ускорение передачи данных за счет параллельно существующих потоков между узлами сети. В этом - его главное отличие от других традиционных устройств локальных сетей – концентраторов (Hub), предоставляющих всем потокам данных сети всего один канал передачи данных.
Коммутатор позволяет передавать параллельно несколько потоков данных c максимально возможной для каждого потока скоростью. Эта скорость ограничена физической спецификацией протокола, которую также часто называют "скоростью провода". Это возможно благодаря наличию в коммутаторе большого числа центров обработки и продвижения кадров и шин передачи данных.
Коммутаторы локальных сетей в своем основном варианте, ставшем классическим уже с начала 90-х годов, работают на втором уровне модели OSI, применяя свою высокопроизводительную параллельную архитектуру для продвижения кадров канальных протоколов. Другими словами, ими выполняются алгоритмы работы моста, описанные в стандартах IEEE 802.1D и 802.1H. Также они имеют и много других дополнительных функций, часть которых вошла в новую редакцию стандарта 802.1D-1998, а часть остается пока не стандартизованной.
Коммутаторы ЛВС отличаются большим разнообразием возможностей и, следовательно, цен - стоимость 1 порта колеблется в диапазоне от 50 до 1000 долларов. Одной из причин столь больших различий является то, что они предназначены для решения различных классов задач. Коммутаторы высокого класса должны обеспечивать высокую производительность и плотность портов, а также поддерживать широкий спектр функций управления. Простые и дешевые коммутаторы имеют обычно небольшое число портов и не способны поддерживать функции управления. Одним из основных различий является используемая в коммутаторе архитектура. Поскольку большинство современных коммутаторов работают на основе патентованных контроллеров ASIC, устройство этих микросхем и их интеграция с остальными модулями коммутатора (включая буферы ввода-вывода) играет важнейшую роль. Контроллеры ASIC для коммутаторов ЛВС делятся на 2 класса - большие ASIC, способные обслуживать множество коммутируемых портов (один контроллер на устройство) и небольшие ASIC, обслуживающие по несколько портов и объединяемые в матрицы коммутации.
Существует 3 варианта архитектуры коммутаторов:
- переключение (cross-bar) с буферизацией на входе,
- самомаршрутизация (self-route) с разделяемой памятью
- высокоскоростная шина.
На рисунке 3 показана блок-схема коммутатора с архитектурой, используемой для поочередного соединения пар портов. В любой момент такой коммутатор может обеспечить организацию только одного соединения (пара портов). При невысоком уровне трафика не требуется хранение данных в памяти перед отправкой в порт назначения - такой вариант называется коммутацией на лету cut-through. Однако, коммутаторы cross-bar требуют буферизации на входе от каждого порта, поскольку в случае использования единственно возможного соединения коммутатор блокируется (рисунок 4). Несмотря на малую стоимость и высокую скорость продвижения на рынок, коммутаторы класса cross-bar слишком примитивны для эффективной трансляции между низкоскоростными интерфейсами Ethernet или token ring и высокоскоростными портами ATM и FDDI.


Коммутаторы с разделяемой памятью имеют общий входной буфер для всех портов, используемый как внутренняя магистраль устройства (backplane). Буферизагия данных перед их рассылкой (store-and-forward - сохранить и переслать) приводит к возникновению задержки. Однако, коммутаторы с разделяемой памятью, как показано на рисунке 5 не требуют организации специальной внутренней магистрали для передачи данных между портами, что обеспечивает им более низкую цену по сравнению с коммутаторами на базе высокоскоростной внутренней шины.

На рисунке 6 показана блок-схема коммутатора с высокоскоростной шиной, связывающей контроллеры ASIC. После того, как данные преобразуются в приемлемый для передачи по шине формат, они помещаются на шину и далее передаются в порт назначения. Поскольку шина может обеспечивать одновременную (паралельную) передачу потока данных от всех портов, такие коммутаторы часто называют "неблокируемыми" (non-blocking) - они не создают пробок на пути передачи данных.

Применение аналогичной параллельной архитектуры для продвижения пакетов сетевых протоколов привело к появлению коммутаторов третьего уровня модели OSI.
Коммутация третьего уровня
В продолжении темы о технологиях коммутации рассмотренных в предыдущем номера повторим, что применение параллельной архитектуры для продвижения пакетов сетевых протоколов привело к появлению коммутаторов третьего уровня. Это позволило существенно, в 10-100 раз повысить скорость маршрутизации по сравнению с традиционными маршрутизаторами, в которых один центральный универсальный процессор выполняет программное обеспечение маршрутизации.
По определению Сетевой уровень (третий) - это комплексный уровень, который обеспечивает возможность соединения и выбор маршрута между двумя конечными системами, подключенными к разным "подсетям", которые могут находиться в разных географических пунктах. В данном случае "подсеть" это, по сути, независимый сетевой кабель (иногда называемый сегментом).
Коммутация на третьем уровне - это аппаратная маршрутизация. Традиционные маршрутизаторы реализуют свои функции с помощью программно-управляемых процессоров, что будем называть программной маршрутизацией. Традиционные маршрутизаторы обычно продвигают пакеты со скоростью около 500000 пакетов в секунду. Коммутаторы третьего уровня сегодня работают со скоростью до 50 миллионов пакетов в секунду. Возможно и дальнейшее ее повышение, так как каждый интерфейсный модуль, как и в коммутаторе второго уровня, оснащен собственным процессором продвижения пакетов на основе ASIC. Так что наращивание количества модулей ведет к наращиванию производительности маршрутизации. Использование высокоскоростной технологии больших заказных интегральных схем (ASIC) является главной характеристикой, отличающей коммутаторы третьего уровня от традиционных маршрутизаторов. Коммутаторы 3-го уровня делятся на две категории: пакетные (Packet-by-Packet Layer 3 Switches, PPL3) и сквозные (Cut-Through Layer 3 Switches, CTL3). PPL3 - означает просто быструю маршрутизацию (Рисунок_7). CTL3 – маршрутизацию первого пакета и коммутацию всех остальных (Рисунок 8).

У коммутатора третьего уровня, кроме реализации функций маршрутизации в специализированных интегральных схемах, имеется несколько особенностей, отличающих их от традиционных маршрутизаторов. Эти особенности отражают ориентацию коммутаторов 3-го уровня на работу, в основном, в локальных сетях, а также последствия совмещения в одном устройстве коммутации на 2-м и 3-м уровнях:
- поддержка интерфейсов и протоколов, применяемых в локальных сетях,
- усеченные функции маршрутизации,
- обязательная поддержка механизма виртуальных сетей,
- тесная интеграция функций коммутации и маршрутизации, наличие удобных для администратора операций по заданию маршрутизации между виртуальными сетями.
Наиболее "коммутаторная" версия высокоскоростной маршрутизации выглядит следующим образом (рисунок 9). Пусть коммутатор третьего уровня построен так, что в нем имеется информация о соответствии сетевых адресов (например, IP-адресов) адресам физического уровня (например, MAC-адресам) Все эти МАС-адреса обычным образом отображены в коммутационной таблице, независимо от того, принадлежат ли они данной сети или другим сетям.

Первый коммутатор, на который поступает пакет, частично выполняет функции маршрутизатора, а именно, функции фильтрации, обеспечивающие безопасность. Он решает, пропускать или нет данный пакет в другую сеть Если пакет пропускать нужно, то коммутатор по IP-адресу назначения определяет МАС-адрес узла назначения и формирует новый заголовок второго уровня с найденным МАС-адресом. Затем выполняется обычная процедура коммутации по данному МАС-адресу с просмотром адресной таблицы коммутатора. Все последующие коммутаторы, построенные по этому же принципу, обрабатывают данный кадр как обычные коммутаторы второго уровня, не привлекая функций маршрутизации, что значительно ускоряет его обработку. Однако функции маршрутизации не являются для них избыточными, поскольку и на эти коммутаторы могут поступать первичные пакеты (непосредственно от рабочих станций), для которых необходимо выполнять фильтрацию и подстановку МАС-адресов.
Это описание носит схематический характер и не раскрывает способов решения возникающих при этом многочисленных проблем, например, проблемы построения таблицы соответствия IP-адресов и МАС-адресов
Примерами коммутаторов третьего уровня, работающих по этой схеме, являются коммутаторы SmartSwitch компании Cabletron. Компания Cabletron реализовала в них свой протокол ускоренной маршрутизации SecureFast Virtual Network, SFVN.
Для организации непосредственного взаимодействия рабочих станций без промежуточного маршрутизатора необходимо сконфигурировать каждую из них так, чтобы она считала собственный интерфейс маршрутизатором по умолчанию. При такой конфигурации станция пытается самостоятельно отправить любой пакет конечному узлу, даже если этот узел находится в другой сети. Так как в общем случае (см. рисунок 10) станции неизвестен МАС-адрес узла назначения, то она генерирует соответствующий ARP-запрос, который перехватывает коммутатор, поддерживающий протокол SFVN. В сети предполагается наличие сервера SFVN Server, являющегося полноценным маршрутизатором и поддерживающего общую ARP-таблицу всех узлов SFVN-сети. Сервер возвращает коммутатору МАС-адрес узла назначения, а коммутатор, в свою очередь, передает его исходной станции. Одновременно сервер SFVN передает коммутаторам сети инструкции о разрешении прохождения пакета с МАС-адресом узла назначения через границы виртуальных сетей. Затем исходная станция передает пакет в кадре, содержащем МАС-адрес узла назначения. Этот кадр проходит через коммутаторы, не вызывая обращения к их блокам маршрутизации. Отличие протокола SFVN компании Cabletron от - описанной выше общей схемы в том, что для нахождения МАС-адреса по IP-адресу в сети используется выделенный сервер.
Протокол Fast IP компании 3Com является еще одним примером реализации подхода с отображением IP-адреса на МАС-адрес. В этом протоколе основными действующими лицами являются сетевые адаптеры (что не удивительно, так как компания 3Com является признанным лидером в производстве сетевых адаптеров Ethernet) С одной стороны, такой подход требует изменения программного обеспечения драйверов сетевых адаптеров, и это минус Но зато не требуется изменять все остальное сетевое оборудование.
При необходимости передать пакет узлу назначения другой сети, исходный узел в соответствии с технологией Fast IP должен передать запрос по протоколу NHRP (Next Hop Routing Protocol) маршрутизатору сети. Маршрутизатор переправляет этот запрос узлу назначения, как обычный пакет Узел назначения, который также поддерживает Fast IP и NHRP, получив запрос, отвечает кадром, отсылаемым уже не маршрутизатору, а непосредственно узлу-источнику (по его МАС-адресу, содержащемуся в NHRP-запросе). После этого обмен идет на канальном уровне на основе известных МАС-адресов. Таким образом, снова маршрутизировался только первый пакет потока (как на рисунке 9 кратковременный поток), а все остальные коммутировались (как на рисунке 9 долговременный поток).
Еще один тип коммутаторов третьего уровня — это коммутаторы, работающие с протоколами локальных сетей типа Ethernet и FDDI. Эти коммутаторы выполняют функции маршрутизации не так, как классические маршрутизаторы. Они маршрутизируют не отдельные пакеты, а потоки пакетов.
Поток — это последовательность пакетов, имеющих некоторые общие свойства. По меньшей мере, у них должны совпадать адрес отправителя и адрес получателя, и тогда их можно отправлять по одному и тому же маршруту. Если классический способ маршрутизации использовать только для первого пакета потока, а все остальные обрабатывать на основании опыта первого (или нескольких первых) пакетов, то можно значительно ускорить маршрутизацию всего потока.
Рассмотрим этот подход на примере технологии NetFlow компании Cisco, реализованной в ее маршрутизаторах и коммутаторах. Для каждого пакета, поступающего на порт маршрутизатора, вычисляется хэш-функция от IP-адресов источника, назначения, портов UDP или TCP и поля TOS, характеризующего требуемое качество обслуживания. Во всех маршрутизаторах, поддерживающих данную технологию, через которые проходит данный пакет, в кэш-памяти портов запоминается соответствие значения хэш-функции и адресной информации, необходимой для быстрой передачи пакета следующему маршрутизатору. Таким образом, образуется квазивиртуальный канал (см. Рисунок 11), который позволяет быстро передавать по сети маршрутизаторов все последующие пакеты этого потока. При этом ускорение достигается за счет упрощения процедуры обработки пакета маршрутизатором - не просматриваются таблицы маршрутизации, не выполняются ARP-запросы.
Этот прием может использоваться в маршрутизаторах, вообще не поддерживающих коммутацию, а может быть перенесен в коммутаторы. В этом случае такие коммутаторы тоже называют коммутаторами третьего уровня. Примеров маршрутизаторов, использующих данный подход, являются маршрутизаторы Cisco 7500, а коммутаторов третьего уровня — коммутаторы Catalyst 5000 и 5500. Коммутаторы Catalyst выполняют усеченные функции описанной схемы, они не могут обрабатывать первые пакеты потоков и создавать новые записи о хэш-функциях и адресной информации потоков. Они просто получают данную информацию от маршрутизаторов 7500 и обрабатывают пакеты уже распознанных маршрутизаторами потоков.
Выше был рассмотрен способ ускоренной маршрутизации, основанный на концепции потока. Его сущность заключается в создании квазивиртуальных каналов в сетях, которые не поддерживают виртуальные каналы в обычном понимании этого термина, то есть сетях Ethernet, FDDI, Token Ring и т п. Следует отличать этот способ от способа ускоренной работы маршрутизаторов в сетях, поддерживающих технологию виртуальных каналов — АТМ, frame relay, X 25. В таких сетях создание виртуального канала является штатным режимом работы сетевых устройств. Виртуальные каналы создаются между двумя конечными точками, причем для потоков данных, требующих разного качества обслуживания (например, для данных разных приложений) может создаваться отдельный виртуальный канал. Хотя время создания виртуального канала существенно превышает время маршрутизации одного пакета, выигрыш достигается за счет последующей быстрой передачи потока данных по виртуальному каналу. Но в таких сетях возникает другая проблема — неэффективная передача коротких потоков, то есть потоков, состоящих из небольшого количества пакетов (классический пример — пакеты протокола DNS).
Накладные расходы, связанные с созданием виртуального канала, приходящиеся на один пакет, снижаются при передаче объемных потоков данных. Однако они становятся неприемлемо высокими при передаче коротких потоков. Для того чтобы эффективно передавать короткие потоки, предлагается следующий вариант, при передаче нескольких первых пакетов выполняется обычная маршрутизация. Затем, после того как распознается устойчивый поток, для него строится виртуальный канал, и дальнейшая передача данных происходит с высокой скоростью по этому виртуальному каналу. Таким образом, для коротких потоков виртуальный канал вообще не создается, что и повышает эффективность передачи.
По такой схеме работает ставшая уже классической технология IP Switching компании Ipsilon. Для того чтобы сети коммутаторов АТМ передавали бы пакеты коротких потоков без установления виртуального канала, компания Ipsilon предложила встроить во все коммутаторы АТМ блоки IP-маршрутизации (рисунок 12), строящие обычные таблицы маршрутизации по обычным протоколам RIP и OSPF.
Компания Cisco Systems выдвинула в качестве альтернативы технологии IP Switching свою собственную технологию Tag Switching, но она не стала стандартной. В настоящее время IETF работает над стандартным протоколом обмена метками MPLS (Multi-Protocol Label Switching), который обобщает предложение компаний Ipsilon и Cisco, а также вносит некоторые новые детали и механизмы. Этот протокол ориентирован на поддержку качества обслуживания для виртуальных каналов, образованных метками.
Коммутация четвертого уровня
Свойства четвертого или транспортного уровня модели OSI следующие: транспортный уровень обеспечивает услуги по транспортировке данных. В частности, заботой транспортного уровня является решение таких вопросов, как выполнение надежной транспортировки данных через объединенную сеть. Предоставляя надежные услуги, транспортный уровень обеспечивает механизмы для установки, поддержания и упорядоченного завершения действия виртуальных каналов, систем обнаружения и устранения неисправностей транспортировки и управления информационным потоком (с целью предотвращения переполнения данными из другой системы).
Некоторые производители заявляют, что их системы могут работать на втором, третьем и даже четвертом уровнях. Однако рассмотрение описания стека TCP/IP (рисунок 1), а также структуры пакетов IP и TCP (рисунки 2, 3), показывает, что коммутация четвертого уровня является фикцией, так как все относящиеся к коммутации функции осуществляются на уровне не выше третьего. А именно, термин коммутация четвертого уровня с точки зрения описания стека TCP/IP противоречий не имеет, за исключением того, что при коммутации должны указываться адреса компьютера (маршрутизатора) источника и компьютера (маршрутизатора) получателя. Пакеты TCP имеют поля локальный порт отправителя и локальный порт получателя (рисунок 3), несущие смысл точек входа в приложение (в программу), например Telnet с одной стороны, и точки входа (в данном контексте инкапсуляции) в уровень IP. Кроме того, в стеке TCP/IP именно уровень TCP занимается формированием пакетов из потока данных идущих от приложения. Пакеты IP (рисунок 2) имеют поля адреса компьютера (маршрутизатора) источника и компьютера (маршрутизатора) получателя и следовательно могут наряду с MAC адресами использоваться для коммутации. Тем не менее, название прижилось, к тому же практика показывает, что способность системы анализировать информацию прикладного уровня может оказаться полезной — в частности для управления трафиком. Таким образом, термин "зависимый от приложения" более точно отражает функции так называемых коммутаторов четвертого уровня.


Тематики
EN
Русско-английский словарь нормативно-технической терминологии > технология коммутации
14 фаза
фаза
Проводник, пучок проводников, ввод, обмотка или иной элемент многофазной системы переменного тока, являющийся токоведущим при нормальном режиме работы.
[ ГОСТ 24291-90]
фаза электрической сети
фаза
Название провода, пучка проводов, вывода, обмотки или иного элемента многофазной системы переменного тока, являющегося токоведущим при нормальной работе
[ОСТ 45.55-99]
фаза
Часть многофазной системы электрических цепей, в которой может протекать один из электрических токов многофазной системы электрических токов.
[ ГОСТ Р 52002-2003]EN
phase
the designation of any conductor, bundle of conductors, terminal, winding or any other element of a polyphase system, which is intended to be energized under normal use
[IEV number 601-03-09]FR
phase
désignation d'un conducteur, d'un faisceau de conducteurs, de bornes, d'enroulements ou de tout autre élément d'un réseau polyphasé et susceptible d'être sous tension en service normal
[IEV number 601-03-09]Тематики
- электроснабжение в целом
- электротехника, основные понятия
EN
DE
FR
15 фаза
Проводник, пучок проводников, ввод, обмотка или иной элемент многофазной системы переменного тока, являющийся токоведущим при нормальном режиме работы
601-03-09
de Aussenleiter
en phase
fr phase
Источник: ГОСТ 24291-90: Электрическая часть электростанции и электрической сети. Термины и определения оригинал документа
Русско-английский словарь нормативно-технической терминологии > фаза
15 Основные функциональные части цифровых коммутационных систем
Основные функциональные части цифровых коммутационных систем
166. Выделитель канальных цифровых сигналов электросвязи
Выделитель
Channel digital signal extractor
Устройство, предназначенное для вывода требуемых канальных цифровых сигналов электросвязи из многоканального цифрового сигнала электросвязи.
Примечание. Выделитель канальных цифровых сигналов электросвязи получает название в зависимости от используемого разделительного признака, например временной выделитель канальных цифровых сигналов электросвязи
Источник: ГОСТ 22670-77: Сеть связи цифровая интегральная. Термины и определения оригинал документа
Русско-английский словарь нормативно-технической терминологии > Основные функциональные части цифровых коммутационных систем
См. также в других словарях:
Православие — название христианского вероисповедания, к которому в настоящее время принадлежат церкви русская, греческая, сербская, черногорская, румынская, славянския в австрийских владениях, греческие и сирская во владениях Турции (патриархаты… … Энциклопедический словарь Ф.А. Брокгауза и И.А. Ефрона
Printf — printf обобщённое название семейства функций или методов стандартных или широкоизвестных коммерческих библиотек, или встроенных операторов некоторых языков программирования, используемых для форматного вывода вывода в различные потоки … Википедия
Snprintf — printf обобщённое название семейства функций или методов стандартных или широкоизвестных коммерческих библиотек, или встроенных операторов некоторых языков программирования, используемых для форматного вывода вывода в различные потоки значений… … Википедия
Sprintf — printf обобщённое название семейства функций или методов стандартных или широкоизвестных коммерческих библиотек, или встроенных операторов некоторых языков программирования, используемых для форматного вывода вывода в различные потоки значений… … Википедия
Swprintf — printf обобщённое название семейства функций или методов стандартных или широкоизвестных коммерческих библиотек, или встроенных операторов некоторых языков программирования, используемых для форматного вывода вывода в различные потоки значений… … Википедия
Vasprintf — printf обобщённое название семейства функций или методов стандартных или широкоизвестных коммерческих библиотек, или встроенных операторов некоторых языков программирования, используемых для форматного вывода вывода в различные потоки значений… … Википедия
Vfprintf — printf обобщённое название семейства функций или методов стандартных или широкоизвестных коммерческих библиотек, или встроенных операторов некоторых языков программирования, используемых для форматного вывода вывода в различные потоки значений… … Википедия
Vsprintf — printf обобщённое название семейства функций или методов стандартных или широкоизвестных коммерческих библиотек, или встроенных операторов некоторых языков программирования, используемых для форматного вывода вывода в различные потоки значений… … Википедия
Vprintf — printf обобщённое название семейства функций или методов стандартных или широкоизвестных коммерческих библиотек, или встроенных операторов некоторых языков программирования, используемых для форматного вывода вывода в различные потоки значений… … Википедия
Vsnprintf — printf обобщённое название семейства функций или методов стандартных или широкоизвестных коммерческих библиотек, или встроенных операторов некоторых языков программирования, используемых для форматного вывода вывода в различные потоки значений… … Википедия
Wprintf — printf обобщённое название семейства функций или методов стандартных или широкоизвестных коммерческих библиотек, или встроенных операторов некоторых языков программирования, используемых для форматного вывода вывода в различные потоки значений… … Википедия
 18+© Академик, 2000-2024
18+© Академик, 2000-2024- Обратная связь: Техподдержка, Реклама на сайте
Экспорт словарей на сайты, сделанные на PHP, Joomla, Drupal, WordPress, MODx.
Перевод: с русского на английский
с английского на русский- С английского на:
- Русский
- С русского на:
- Все языки
- Английский
- Немецкий
- Французский